1. Semáforo




2. Reto






3.Sensor ultrasonido

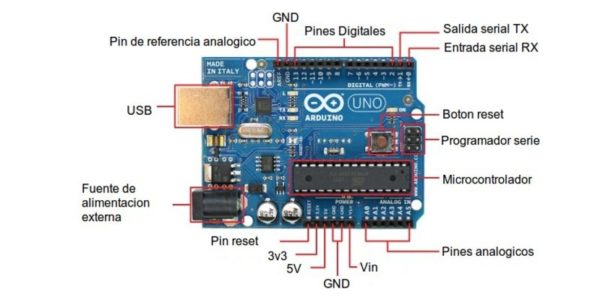
2. Hacer un cuadro comparativo entre los dos Arduinos anteriores.


A. ¿Qué es?B. ¿Cuáles son sus partes?C. ¿Cuál es su función?
3. sensor ultrasonido Hc-sr04

















Robótica Colpre





:Propone problemas y soluciones roboticas frente al mundo actual y sus necesidades.
Robots en la industria:
Antes de comenzar, es válido aclarar que existen robots industriales y no-industriales. Los industriales brindan servicio en la industria y por eso se caracterizan por su robustez y flexibilidad, más un importante sentido de utilidad; los no-industriales son los que brindan servicio fuera de entornos industriales, por ejemplo, en tareas médicas.
En pocas palabras, se puede definir un robot como una máquina capaz de realizar ciertas tareas de las personas. Existen dos tipos: robots que realizan tareas mentales y robots que realizan tareas físicas. Los primeros son conocidos como robots de software y son capaces de desarrollar tareas que tienen que ver con el pensamiento, la lógica, la toma de decisiones; los segundos son los que en las industrias, por ejemplo, durante muchos años llevaron cabo tareas asociadas a procesos de manufactura, es decir, soldadura, armado, atornillado, acomodado, etcétera. Dentro de este segundo grupo, los robots más difundidos son los manipuladores.
En un principio, fue difícil incorporar robots en la industria. Se dio un fenómeno similar a lo que ocurrió con las computadoras en los hogares: parecía que no servían para nada porque no hacían nada nuevo; ya existían la calculadora y la máquina de escribir, de modo que parecía un sinsentido incorporar un dispositivo costoso cuyo único mérito era reunir esas funcionalidades en un solo equipo. Pero, en rigor, esto no fue un hecho menor, fue la aparición de un nuevo concepto: se puede tener una cámara de fotos por un lado y una casilla de correo electrónico por otro, pero si se tienen reunidas en el celular, se puede sacar una foto y mandarla al instante a otra persona. El solo hecho de reunir funcionalidades permite hacerlas interactuar entre sí, ampliando el espectro de acciones que se pueden llevar a cabo.

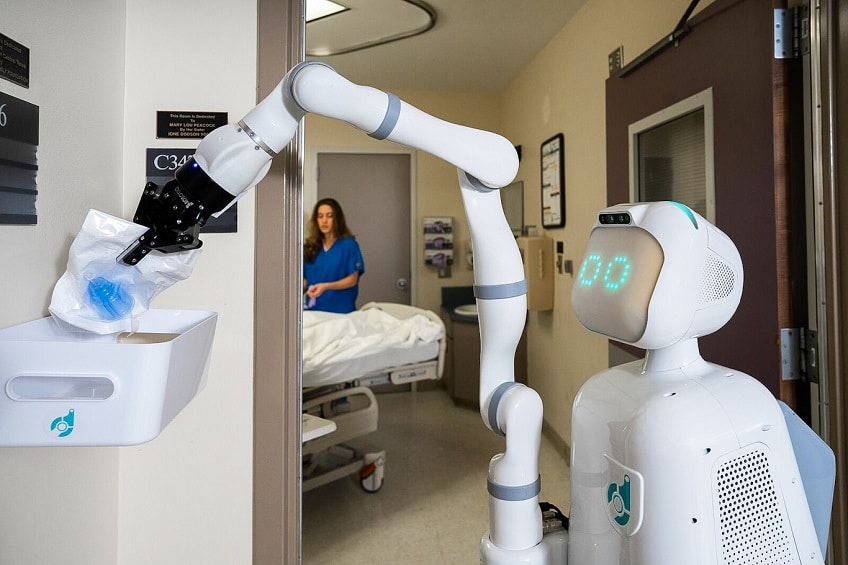
Robots enfermeros:
Los robots son dispositivos automáticos que poseen conexiones de realimentación precisos y confiables entre sus sensores y el ambiente en el que se encuentran;en el área de la salud, su utilización puede evitar el acaecimiento de errores en la atención de los pacientes y auxiliar en actividades de distribución de comidas y de ropas en los hospitales, entre otras cosas.
Estas maquinas posibilitan la realización de los procedimientos con gran precisión, disminuyen el tiempo de duración de algunas técnicas y facilitan la manipulación en áreas de difícil acceso. También aumentan las posibilidades de cura de pacientes oncológicos y se constituye en una practica solida estima que existen más de 3.500 robots en unidades hospitalarias para operaciones de alta complejidad ya que se adecuan a la situación y compensan el temblor de la mano humana, realizando movimientos minúsculos con precisión.
En la asistencia de enfermería su utilización viene ganando terreno, aunque de manera tímida.Se han identificado patentes de robots para la atención de enfermería y su uso esta vinculado a las necesidades de personas mayores o deficientes, en especial en algunas regiones de Asia, Europa y América del norte.
Agosto 24 2020
Propósito:Identifica las características de un sistema robotico.
Sistemas Roboticos
Un robot es esencialmente un sistema organizado de forma tal que responde con una acción inteligente a los estímulos que es capaz de percibir.
A continuación mencionare cuatro sistemas roboticos
1.Sistema mecánico:(es el que hace posible el movimiento y sus elementos se llaman actuadores, motores y articulaciones.)

motores

2.Sistema electrónico:(es el encargado de la energía eléctrica por medio de baterías y cableado eléctrico)
3.Sistema control:(es el cerebro del robot se trabaja atravez de tarjetas.)









